Системы деления истинного горизонта.
Дата добавления: 2014-09-05 | Просмотров: 1734
|
|
2. Практическая работа № 3. Перевод направлений в различных системах счета, соотношение между курсом судна, пеленгом и курсовым углом на ориентир.
Расчет склонения, девиации, поправки компаса. Исправление и перевод курсов и пеленгов.
2.1. Тема. Перевод направлений в различных системах счета, соотношение между курсом судна, пеленгом и курсовым углом на ориентир. Расчет склонения, девиации, поправки компаса. Исправление и перевод курсов и пеленгов.
Продолжительность 2 часа.
2.2. Учебная цель.
Закрепить понятия и определения по теме.
Освоить методику определения направлений в море в различных системах счета.
Освоить методику расчета направлений относительно географического меридиана и ДП судна.
Освоить методику расчета истинных направлений с помощью магнитного компаса, выборки магнитного склонения, приведения его к дате плавания, выборки девиации, расчета поправки магнитного компаса.
Освоить методику перевода и исправления румбов.
2.3. Содержание работы:
2.3.1 Перевод направлений в различные системы счета.
2.3.2 Решение задач на соотношение между истинными направлениями.
2.3.3 Расчет магнитного склонения.
3.2.4 Выборка девиации из таблицы.
2.3.5. Расчет общей поправки магнитного компаса.
2.3.5. Перевод и исправление румбов.
2.3.6. Исправление румбов
2.4. Необходимые учебные пособия и инструменты.
2.4.1.Методические указания по выполнению практической работы.
2.4.2.Учебник: Ляльков Э.П., Васин А.Г. Навигация. Учебник для средних уч. завед. мор. трансп. – 2-е изд., перераб. и доп. – М.: Транспорт, 1981. – 349 с. § 9 - 19.
2.4.3.Задачник по навигации и лоции: Учебное пособие для вузов морского транспорта/Под редакцией М.И. Гаврюка – 3-е изд., перераб. и доп. - М.: Транспорт, 1984. – 312 с. Глава 2, п. 2.2, 2.3, 2.5, 2.6, 2.7.
2.4.4.Конспект лекций.
2.4.5.Мореходные таблицы МТ – 75 (МТ – 2000).
2.4.6.Калькулятор.
Для вычислений использовать учебную таблицу девиации 3.1.
2.5. Основные понятия, определения, зависимости.
2.5.1.Основные линии и плоскости наблюдателя.
Судно, находясь в море, не стоит на месте а, большей частью, находится в постоянном движении. Для того, чтобы знать направление этого движения, а также направления с судна на различные предметы (навигационные ориентиры, соседние суда и т.д.) нужно выбрать такие линии и плоскости, принимаемые за исходные, от которых можно было бы вести отсчет этих направлений.
 Основные линии и плоскости наблюдателя.
Основные линии и плоскости наблюдателя.
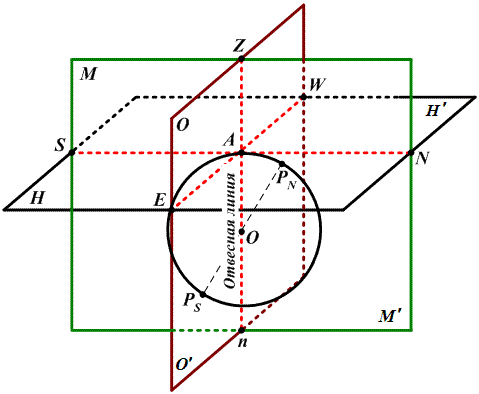
Построим (см. рисунок) земной эллипсоид (земную сферу) и предположим, что наблюдатель находится на Гринвичском (начальном)меридиане в верхней части сферы (т. А).
Отметим на земной сфере:
- т. О – центр сферы;
- линия PNPS – ось Земли, а точки PN и PS – северный и южный географические полюсы.
Через место наблюдателя (т. А) и центр Земли (т. О) проведем прямую – отвесную линию (ZAOn), тогда:
– отвесная линия, проходящая через точку наблюдателя, показывает направления:
- – над головой наблюдателя – на точку Z – зенит наблюдателя;
- – в противоположную сторону – на точку n – надир наблюдателя.
Через место наблюдателя (т. А) перпендикулярно отвесной линии (ZAOn) проведем плоскость Н-Н′, тогда:
 горизонтальная плоскость, перпендикулярная направлению отвесной линии и проходящая через место (глаз) наблюдателя называется плоскостью истинного горизонта наблюдателя.
горизонтальная плоскость, перпендикулярная направлению отвесной линии и проходящая через место (глаз) наблюдателя называется плоскостью истинного горизонта наблюдателя.
Надгоризонтная часть – все, что находится над истинным горизонтом и «видимо» для наблюдателя.
Подгоризонтная часть – все, что находится под истинным горизонтом и «скрыто» от наблюдателя.
Построим плоскость М-М′, проходящую через место наблюдателя и полюсы Земли (PN и PS), тогда:
вертикальная плоскость, проходящая через отвесную линию, место наблюдателя и полюсы Земли, называется плоскостью истинного меридиана наблюдателя.
Плоскость истинного меридиана наблюдателя (ИМН) пересекает плоскость истинного горизонта наблюдателя (ИГН) по прямой линии (N-S), называемой линией истинного меридиана наблюдателя (ИМН) или полуденной линией (линия NAS).
Часть линии ИМН – линия А-N – северная часть ИМН; другая ее часть – линия А-S – южная часть ИМН.
Линия ИМН соответствует направлению (от наблюдателя) на северный (PN) и южный (PS) полюсы.
На этом основании точка истинного горизонта наблюдателя, определяющая направление на северный полюс (PN), обозначается как N («норд»), а противоположная ей как S («зюйд»).
Проведем теперь вертикальную плоскость (О-О′), которая пройдет через отвесную линию (ZOn) перпендикулярно плоскости ИМН (М-М′), тогда:
вертикальная плоскость, проходящая через отвесную линию и перпендикулярная плоскости ИМН, называется плоскостью I-го вертикала наблюдателя.
Плоскость I-го вертикала наблюдателя (О-О′) пересекает плоскость истинного горизонта наблюдателя (Н-Н′) по линии, указывающей направление на восток – т. Е («ист») и запад – т. W («вест»).
Направления N («норд»), S («зюйд»), Е («ист»), W («вест») называются главными направлениями («главными румбами»).
Для каждой точки земной поверхности главные направления занимают вполне определенное положение.
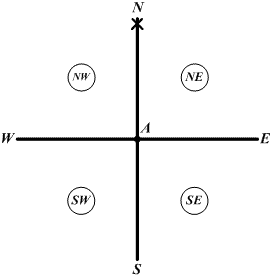 Главные направления.
Главные направления.
Главные направления делят плоскость ИГН на 4 равные четверти: NE, SE, SW, NW.
Любое направление на поверхности Земли может быть измерено наблюдателем углом в плоскости ИГН от линии N-S меридиана.
Для определения направлений в плоскости ИГН используются три системы деления горизонта, три системы счета направлений (круговая, полукруговая, четвертная).
А). Круговая система счета направлений является основной системой счета. В этой системе горизонт делится на 360° и счет направлений ведется от 0° до 360° от северной части истинного меридиана наблюдателя NИ вправо по ходу часовой стрелки.
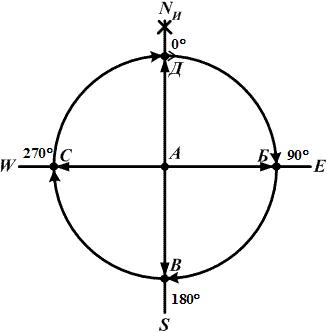 Круговая система счета направлений
Круговая система счета направлений
Наблюдатель (т. А) – в центре.
Тогда направления:
- на т. Б – 90°;
- на т. В – 180°;
- на т. С – 270°;
- на т. Д – 360° или 0°.
Если при расчете направлений получится значение более 360° (390°), то от результата следует вычесть 360° (т.е. один оборот 390° – 360° = 30°).
Круговая система счета направлений применяется в судовождении для определения направления движения судна (курс) и определения направления с судна на береговые ориентиры, соседние суда и пр. (пеленг).