Румбовая система счета направлений
Дата добавления: 2014-09-05 | Просмотров: 1740
|
|
2.5.2.Задачи на перевод направлений в круговую систему счета.
| Дано-Ответ | |||||
| Румбовая | NtE – | NNE – | NEtN – | NEtE – | ENE – |
| Четвертная | 20°SE – | 30°SW – | 30°SE – | 20°NW– | 40°SE – |
| Полукруговая | N10°W– | S10°E – | S10°W– | N20°W– | S20°E – |
| Дано-Ответ | |||||
| Румбовая | EtN – | EtS – | ESE – | SЕtE– | SЕtS- |
| Четвертная | 40°SW– | 30°NW– | 50°SE – | 50°SW – | 40°NW– |
| Полукруговая | S20°W– | N30°W– | S30°E – | S30°W – | N40°W– |
2.5.3.Истинные направления и их соотношения.
При нахождении судна в море, деятельность судоводителя непосредственно связана с определением направления движения судна, а также с определением направлений на подвижные (соседние корабли, суда, самолеты, вертолеты) и неподвижные (береговые ориентиры, буи, бочки и пр.) объекты.
Направление движения судна характеризуется его истинным курсом.
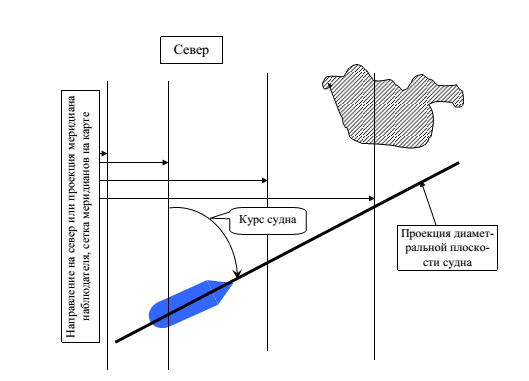
Покажем это на рис. 2.7 для чего:
 Истинный курс судна.
Истинный курс судна.
· проведем северную часть истинного меридиана наблюдателя, находящегося на судне
С → С-NИ;
· продолжим носовую часть продольной оси симметрии судна → С-К, тогда:
– истинный курс судна есть ничто иное, как направление продольной оси судна, измеряемое горизонтальным углом между северной частью истинного меридиана и носовой частью продольной оси судна.
Истинный курс судна измеряется в круговой системе счета направлений от 0° до 360° (по часовой стрелке) и обозначается – как ИК.
Направление на объект наблюдения определяется или относительно носовой части продольной оси судна (курсовой угол), или относительно северной части истинного меридиана наблюдателя (истинный пеленг).
Истинным пеленгом называется горизонтальный угол в плоскости истинного горизонта наблюдателя между северной частью истинного меридиана наблюдателя и направлением из точки наблюдения на объект. Истинный пеленг (ИП) – двугранный угол между северной частью плоскости истинного меридиана и вертикальной плоскостью, проходящей через наблюдателя, центр земного шара и предмет, пеленг на который мы определяем.
